X86 Assembly Guide
Overview
This guide describes the basics of 32-bit x86 assembly language programming, covering a small but useful subset of the available instructions and assembler directives. There are several different assembly languages for generating x86 machine code. The one we will use in CS216 is the Microsoft Macro Assembler (MASM) assembler. MASM uses the standard Intel syntax for writing x86 assembly code.
The full x86 instruction set is large and complex (Intel’s x86 instruction set manuals comprise over 2900 pages), and we do not cover it all in this guide. For example, there is a 16-bit subset of the x86 instruction set. Using the 16-bit programming model can be quite complex. It has a segmented memory model, more restrictions on register usage, and so on. In this guide, we will limit our attention to more modern aspects of x86 programming, and delve into the instruction set only in enough detail to get a basic feel for x86 programming.
Registers
Modern (i.e 386 and beyond) x86 processors have eight 32-bit general purpose registers, as depicted in Figure 1. The register names are mostly historical. For example, EAX used to be called the accumulator since it was used by a number of arithmetic operations, and ECX was known as the counter since it was used to hold a loop index. Whereas most of the registers have lost their special purposes in the modern instruction set, by convention, two are reserved for special purposes—the stack pointer (ESP) and the base pointer (EBP).
For the EAX, EBX, ECX, and EDX registers, subsections may be used. For example, the least significant 2 bytes of EAX can be treated as a 16-bit register called AX. The least significant byte of AX can be used as a single 8-bit register called AL, while the most significant byte of AX can be used as a single 8-bit register called AH. These names refer to the same physical register. When a two-byte quantity is placed into DX, the update affects the value of DH, DL, and EDX. These sub-registers are mainly hold-overs from older, 16-bit versions of the instruction set. However, they are sometimes convenient when dealing with data that are smaller than 32-bits (e.g. 1-byte ASCII characters).
When referring to registers in assembly language, the names are not case-sensitive. For example, the names EAX and eax refer to the same register.
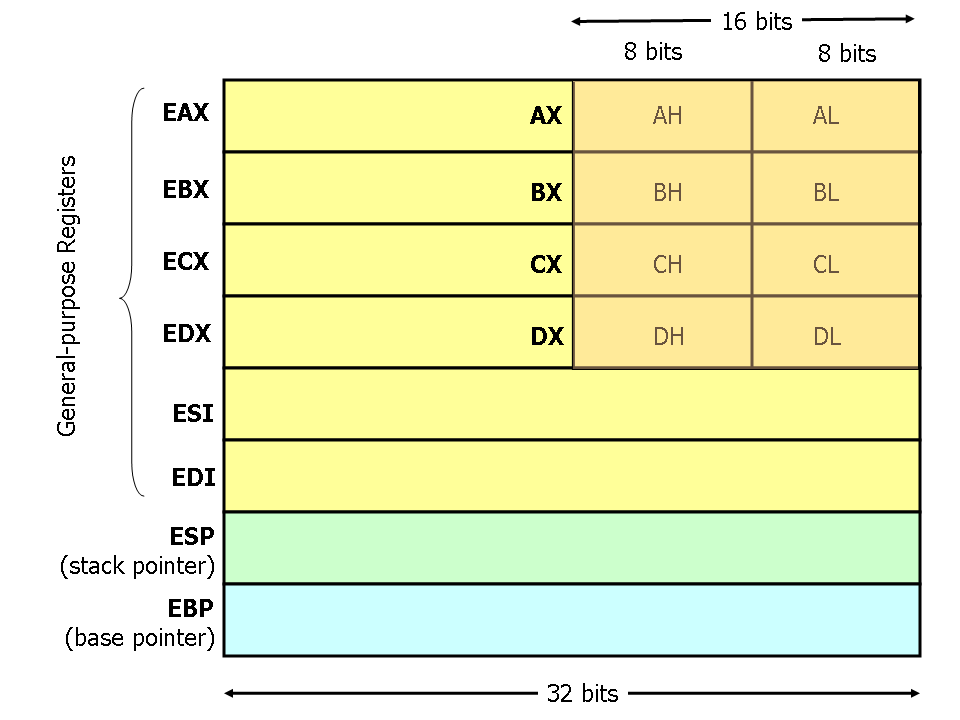
Figure 1. x86 Registers
Memory and Addressing Modes
Declaring Static Data Regions
You can declare static data regions (analogous to global variables) in x86 assembly using special assembler directives for this purpose. Data declarations should be preceded by the .DATA directive. Following this directive, the directives DB, DW, and DD can be used to declare one, two, and four byte data locations, respectively. Declared locations can be labeled with names for later reference—this is similar to declaring variables by name, but abides by some lower level rules. For example, locations declared in sequence will be located in memory next to one another.
Example declarations:
.DATA
var DB 64 ; Declare a byte, referred to as location *var*, containing the value 64.
var2 DB ? ; Declare an uninitialized byte, referred to as location *var2*.
DB 10 ; Declare a byte with no label, containing the value 10. Its location is *var2* + 1.
X DW ? ; Declare a 2-byte uninitialized value, referred to as location *X*.
Y DD 30000 ; Declare a 4-byte value, referred to as location *Y*, initialized to 30000.
Unlike in high level languages where arrays can have many dimensions and are accessed by indices, arrays in x86 assembly language are simply a number of cells located contiguously in memory. An array can be declared by just listing the values, as in the first example below. Two other common methods used for declaring arrays of data are the DUP directive and the use of string literals. The DUP directive tells the assembler to duplicate an expression a given number of times. For example, 4 DUP(2) is equivalent to 2, 2, 2, 2.
Some examples:
Z DD 1, 2, 3 ; Declare three 4-byte values, initialized to 1, 2, and 3. The value of location Z + 8 will be 3.
bytes DB 10 DUP(?) ; Declare 10 uninitialized bytes starting at location *bytes*.
arr DD 100 DUP(0) ; Declare 100 4-byte words starting at location arr, all initialized to 0
str DB 'hello',0 ; Declare 6 bytes starting at the address str, initialized to the ASCII character values for hello and the null (0) byte.
Addressing Memory
Modern x86-compatible processors are capable of addressing up to 232 bytes of memory: memory addresses are 32-bits wide. In the examples above, where we used labels to refer to memory regions, these labels are actually replaced by the assembler with 32-bit quantities that specify addresses in memory. In addition to supporting referring to memory regions by labels (i.e. constant values), the x86 provides a flexible scheme for computing and referring to memory addresses: up to two of the 32-bit registers and a 32-bit signed constant can be added together to compute a memory address. One of the registers can be optionally pre-multiplied by 2, 4, or 8.
The addressing modes can be used with many x86 instructions (we’ll describe them in the next section). Here we illustrate some examples using the mov instruction that moves data between registers and memory. This instruction has two operands: the first is the destination and the second specifies the source.
Some examples of mov instructions using address computations are:
mov eax, [ebx] ; Move the 4 bytes in memory at the address contained in EBX into EAX
mov [var], ebx ; Move the contents of EBX into the 4 bytes at memory address *var*. (Note, *var* is a 32-bit constant).
mov eax, [esi-4] ; Move 4 bytes at memory address ESI + (-4) into EAX
mov [esi+eax], cl ; Move the contents of CL into the byte at address ESI+EAX
mov edx, [esi+4*ebx] ; Move the 4 bytes of data at address ESI+4*EBX into EDX
Some examples of invalid address calculations include:
mov eax, [ebx-ecx] ; Can only **add** register values
mov [eax+esi+edi], ebx ; At most **2** registers in address computationSize Directives
In general, the intended size of the data item at a given memory address can be inferred from the assembly code instruction in which it is referenced. For example, in all of the above instructions, the size of the memory regions could be inferred from the size of the register operand. When we were loading a 32-bit register, the assembler could infer that the region of memory we were referring to was 4 bytes wide. When we were storing the value of a one byte register to memory, the assembler could infer that we wanted the address to refer to a single byte in memory.
However, in some cases the size of a referred-to memory region is ambiguous. Consider the instruction mov [ebx], 2. Should this instruction move the value 2 into the single byte at address EBX? Perhaps it should move the 32-bit integer representation of 2 into the 4-bytes starting at address EBX. Since either is a valid possible interpretation, the assembler must be explicitly directed as to which is correct. The size directives BYTE PTR, WORD PTR, and DWORD PTR serve this purpose, indicating sizes of 1, 2, and 4 bytes respectively.
For example:
mov BYTE PTR [ebx], 2 ; Move 2 into the single byte at the address stored in EBX.
mov WORD PTR [ebx], 2 ; Move the 16-bit integer representation of 2 into the 2 bytes starting at the address in EBX.
mov DWORD PTR [ebx], 2 ; Move the 32-bit integer representation of 2 into the 4 bytes starting at the address in EBX.Instructions
Machine instructions generally fall into three categories: data movement, arithmetic/logic, and control-flow. In this section, we will look at important examples of x86 instructions from each category. This section should not be considered an exhaustive list of x86 instructions, but rather a useful subset. For a complete list, see Intel’s instruction set reference.
We use the following notation:
| Registry | Description |
|---|---|
| <reg32> | Any 32-bit register (EAX, EBX, ECX, EDX, ESI, EDI, ESP, or EBP) |
| <reg16> | Any 16-bit register (AX, BX, CX, or DX) |
| <reg8> | Any 8-bit register (AH, BH, CH, DH, AL, BL, CL, or DL) |
| <reg> | Any register |
| <mem> | A memory address (e.g., [eax], [var + 4], or dword ptr [eax+ebx]) |
| <con32> | Any 32-bit constant |
| <con16> | Any 16-bit constant |
| <con8> | Any 8-bit constant |
| <con> | Any 8-, 16-, or 32-bit constant |
Data Movement Instructions
mov—Move (Opcodes: 88, 89, 8A, 8B, 8C, 8E, …)
The mov instruction copies the data item referred to by its second operand (i.e. register contents, memory contents, or a constant value) into the location referred to by its first operand (i.e. a register or memory). While register-to-register moves are possible, direct memory-to-memory moves are not. In cases where memory transfers are desired, the source memory contents must first be loaded into a register, then can be stored to the destination memory address.
Syntax
mov <reg>,<reg>
mov <reg>,<mem>
mov <mem>,<reg>
mov <reg>,<const>
mov <mem>,<const>Examples
mov eax, ebx—copy the value in ebx into eax
mov byte ptr [var], 5—store the value 5 into the byte at location var
push—Push stack (Opcodes: FF, 89, 8A, 8B, 8C, 8E, …)
The push instruction places its operand onto the top of the hardware supported stack in memory. Specifically, push first decrements ESP by 4, then places its operand into the contents of the 32-bit location at address [ESP]. ESP (the stack pointer) is decremented by push since the x86 stack grows down - i.e. the stack grows from high addresses to lower addresses.
Syntax
push <reg32>
push <mem>
push <con32>Examples
push eax—push eax on the stack
push [var]—push the 4 bytes at address var onto the stack
pop—Pop stack
The pop instruction removes the 4-byte data element from the top of the hardware-supported stack into the specified operand (i.e. register or memory location). It first moves the 4 bytes located at memory location [SP] into the specified register or memory location, and then increments SP by 4.
Syntax
pop <reg32>
pop <mem>Examples
pop edi—pop the top element of the stack into EDI.
pop [ebx]—pop the top element of the stack into memory at the four bytes starting at location EBX.
lea—Load effective address
The lea instruction places the address specified by its second operand into the register specified by its first operand. Note, the contents of the memory location are not loaded, only the effective address is computed and placed into the register. This is useful for obtaining a pointer into a memory region.
Syntax
lea <reg32>,<mem>Examples
lea edi, [ebx+4*esi]—the quantity EBX+4*ESI is placed in EDI.
lea eax, [var]—the value in var is placed in EAX.
lea eax, [val]—the value *val* is placed in EAX.
x86-64 Flags & Conditional Moves (cheatsheet)
Key Flags Set by cmp / sub
cmp a, b computes a - b (no writeback) and sets EFLAGS:
- ZF (Zero):
1if result == 0 → “equal” - CF (Carry): Unsigned borrow →
1ifa < b(unsigned) - SF (Sign): MSB of result (1 = negative)
- OF (Overflow): Signed overflow on
a - b - PF (Parity): Parity of low byte (rarely used)
- AF (Adjust): BCD/legacy (almost never used)
Unsigned comparisons use CF/ZF. Signed comparisons use SF/OF/ZF.
Conditional Move Basics
- Form:
cmovcc dst, src(movessrc→dstif conditioncctrue; otherwisedstunchanged) - Reads EFLAGS from the most recent
cmp/sub/ALU op. - Doesn’t branch → good for avoiding mispredicts / keeping ≤ N jumps constraints.
- Available since i686 (Pentium Pro) and all modern x86-64.
Common cmovcc Conditions
Equality
cmove/cmovz—if ZF=1 (equal)cmovne/cmovnz—if ZF=0 (not equal)
Unsigned
cmova—CF=0 & ZF=0 (strictly above,a > bunsigned)cmovae/cmovnc—CF=0 (above or equal,a ≥ bunsigned)cmovb/cmovc—CF=1 (below, carry set,a < bunsigned)cmovbe—CF=1 | ZF=1 (below or equal,a ≤ bunsigned)
Signed
cmovg—ZF=0 & SF=OF (greater,a > bsigned)cmovge—SF=OF (greater or equal,a ≥ bsigned)cmovl—SF≠OF (less,a < bsigned)cmovle—ZF=1 | SF≠OF (less or equal,a ≤ bsigned)
Misc
cmovs—SF=1 (negative)cmovns—SF=0 (non-negative)cmovo—OF=1 (overflow)cmovno—OF=0 (no overflow)cmovp/cmovpe—PF=1 (parity even)cmovnp/cmovpo—PF=0 (parity odd)
Patterns you’ll Use a Lot
Clamp to Max (unsigned)
; rdi = index, cap at 4: rdi = min(rdi, 4)
cmp rdi, 4
mov rax, 4
cmova rdi, rax ; if rdi > 4 (unsigned), rdi = 4Select Min / Max (signed)
; rax = min(rbx, rcx) signed
mov rax, rbx
cmp rbx, rcx
cmovg rax, rcx ; if b > c, pick c
; rax = max(rbx, rcx) signed
mov rax, rbx
cmp rbx, rcx
cmovl rax, rcx ; if b < c, pick cAbsolute Value (signed 32-bit)
; eax := abs(eax)
cdq ; sign-extend eax → edx:eax (sets edx to 0 or -1)
xor eax, edx
sub eax, edx ; branchless abs(Or compare against 0 and use cmov between eax and -eax.)
Notes & Tips
- Writing to a 32-bit reg (e.g.,
mov eax, imm32) zero-extends into the 64-bit reg (sorax=imm32). - For unsigned compares, think CF/ZF; for signed, think SF/OF/ZF.
cmp a, bisa - b:- Unsigned
a < b⇒ CF=1 - Signed
a < b⇒ SF≠OF
- Unsigned
cmovdoesn’t modify flags; safe to chain after onecmp.
Arithmetic and Logic Instructions
add—Integer Addition
The add instruction adds its two operands, storing the result in the first operand. Both operands may be registers, but at most one can be a memory location.
Syntax
add <reg>, <reg>
add <reg>, <mem>
add <mem>, <reg>
add <reg>, <const>
add <mem>, <const>Examples
add eax, 10 ; EAX ← EAX + 10
add BYTE PTR [var], 10 ; Add 10 to the single byte stored at memory address varsub—Integer Subtraction
The sub instruction subtracts the value of the second operand from the first operand and stores the result in the first operand.
Syntax
sub <reg>, <reg>
sub <reg>, <mem>
sub <mem>, <reg>
sub <reg>, <const>
sub <mem>, <const>Examples
sub al, ah ; AL ← AL - AH
sub eax, 216 ; Subtract 216 from the value in EAXinc, dec—Increment, Decrement
The inc instruction increments the contents of its operand by one.
The dec instruction decrements the contents of its operand by one.
Syntax
inc <reg>
inc <mem>
dec <reg>
dec <mem>Examples
dec eax ; Subtract one from EAX
inc DWORD PTR [var] ; Add one to the 32-bit integer stored at varimul—Integer Multiplication
The imul instruction has two forms:
- Two-operand form: multiplies two operands, storing the result in the first operand (must be a register).
- Three-operand form: multiplies the second and third operands, storing the result in the first operand (must be a register). The third operand must be a constant.
Syntax
imul <reg32>, <reg32>
imul <reg32>, <mem>
imul <reg32>, <reg32>, <const>
imul <reg32>, <mem>, <const>Examples
imul eax, [var] ; EAX ← EAX * [var], result stored in EAX
imul esi, edi, 25 ; ESI ← EDI * 25idiv—Integer Division
The idiv instruction divides the 64-bit value in EDX:EAX (EDX = high 32 bits, EAX = low 32 bits) by the specified operand. The quotient is stored in EAX, and the remainder in EDX.
Syntax
idiv <reg32>
idiv <mem>Examples
idiv ebx ; Divide EDX:EAX by EBX → quotient in EAX, remainder in EDX
idiv DWORD PTR [var] ; Divide EDX:EAX by [var] → quotient in EAX, remainder in EDXand, or, xor—Bitwise Logical Operations
These instructions perform bitwise logical operations (and, or, xor) on their operands, storing the result in the first operand.
Syntax
and <reg>, <reg>
and <reg>, <mem>
and <mem>, <reg>
and <reg>, <const>
and <mem>, <const>
or <reg>, <reg>
or <reg>, <mem>
or <mem>, <reg>
or <reg>, <const>
or <mem>, <const>
xor <reg>, <reg>
xor <reg>, <mem>
xor <mem>, <reg>
xor <reg>, <const>
xor <mem>, <const>Examples
and eax, 0Fh ; Clear all but the last 4 bits of EAX
xor edx, edx ; Zero out EDXnot—Bitwise Logical NOT
The not instruction flips all bits of its operand (bitwise negation).
Syntax
not <reg>
not <mem>Example
not BYTE PTR [var] ; Negate all bits in the byte at memory location varneg—Negate
The neg instruction computes the two’s complement negation of its operand (i.e., dest ← -dest).
Syntax
neg <reg>
neg <mem>Example
neg eax ; EAX ← -EAXshl, shr—Shift Left, Shift Right
These instructions shift the bits in their operand left or right.
shlpads with zeros on the right, equivalent to multiplying by powers of 2.shrpads with zeros on the left, equivalent to unsigned division by powers of 2.
The shift count can be an 8-bit constant or the register CL. Shift counts greater than 31 are taken modulo 32.
Syntax
shl <reg>, <const8>
shl <mem>, <const8>
shl <reg>, cl
shl <mem>, cl
shr <reg>, <const8>
shr <mem>, <const8>
shr <reg>, cl
shr <mem>, clExamples
shl eax, 1 ; Multiply the value of EAX by 2 (if MSB was 0)
shr ebx, cl ; EBX ← EBX / 2^CL (integer division)Control Flow Instructions
The x86 processor maintains an instruction pointer (EIP/RIP), which points to the current instruction in memory. Normally, it increments automatically, but control flow instructions can modify it directly. Labels (<label>:) provide symbolic names for code addresses, making jumps easier to read and maintain.
Example with a label:
mov esi, [ebp+8]
begin: xor ecx, ecx
mov eax, [esi]Here, begin is a label that refers to the xor ecx, ecx instruction.
jmp—Jump
The jmp instruction transfers control flow unconditionally to the instruction at the specified label.
Syntax
jmp <label>Example
jmp begin ; Jump to the instruction labeled 'begin'
jcc—Conditional Jump
Conditional jumps transfer control flow only if condition codes (set by arithmetic/logic ops or cmp) meet a given condition. These condition codes live in the EFLAGS register (a.k.a. machine status word).
Syntax (common forms)
je <label> ; Jump if equal (ZF = 1)
jne <label> ; Jump if not equal (ZF = 0)
jz <label> ; Jump if zero (ZF = 1)
jg <label> ; Jump if greater
jge <label> ; Jump if greater or equal
jl <label> ; Jump if less
jle <label> ; Jump if less or equalExample
cmp eax, ebx
jle done ; If EAX <= EBX, jump to 'done'


cmp—Compare
The cmp instruction subtracts the second operand from the first operand, updates the condition codes, but discards the result. It’s used for conditional jumps.
Syntax
cmp <reg>, <reg>
cmp <reg>, <mem>
cmp <mem>, <reg>
cmp <reg>, <const>Example
cmp DWORD PTR [var], 10
je loop ; If [var] == 10, jump to 'loop'call, ret—Subroutine Call and Return
call <label>pushes the current instruction pointer onto the stack and jumps to the subroutine at<label>.retpops the return address from the stack and jumps back.
Syntax
call <label>
retCalling Convention
To allow separate programmers to share code and develop libraries for use by many programs, and to simplify the use of subroutines in general, programmers typically adopt a common calling convention. The calling convention is a protocol about how to call and return from routines. For example, given a set of calling convention rules, a programmer need not examine the definition of a subroutine to determine how parameters should be passed to that subroutine. Furthermore, given a set of calling convention rules, high-level language compilers can be made to follow the rules, thus allowing hand-coded assembly language routines and high-level language routines to call one another.
In practice, many calling conventions are possible. We will use the widely used C language calling convention. Following this convention will allow you to write assembly language subroutines that are safely callable from C (and C++) code, and will also enable you to call C library functions from your assembly language code.
The C calling convention is based heavily on the use of the hardware-supported stack. It is based on the push, pop, call, and ret instructions. Subroutine parameters are passed on the stack. Registers are saved on the stack, and local variables used by subroutines are placed in memory on the stack. The vast majority of high-level procedural languages implemented on most processors have used similar calling conventions.
The calling convention is broken into two sets of rules. The first set of rules is employed by the caller of the subroutine, and the second set of rules is observed by the writer of the subroutine (the callee). It should be emphasized that mistakes in the observance of these rules quickly result in fatal program errors since the stack will be left in an inconsistent state; thus meticulous care should be used when implementing the call convention in your own subroutines.
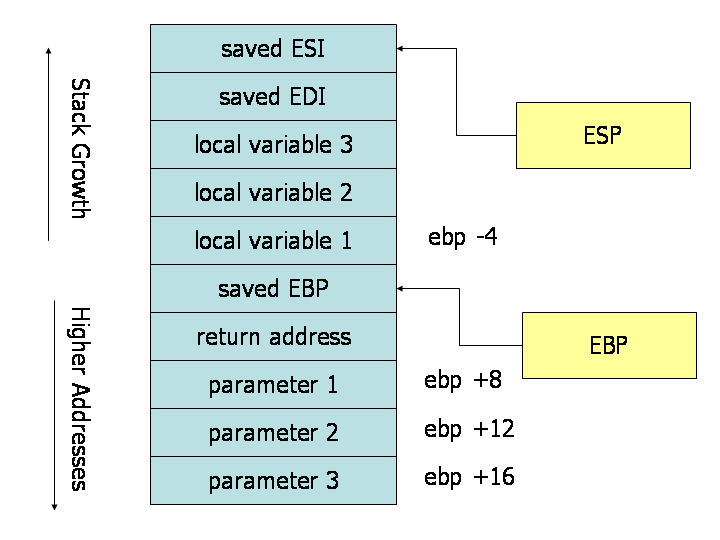 >
>Stack during Subroutine Call
[Thanks to Maxence Faldor for providing a correct figure and to James Peterson for finding and fixing the bug in the original version of this figure!]
A good way to visualize the operation of the calling convention is to draw the contents of the nearby region of the stack during subroutine execution. The image above depicts the contents of the stack during the execution of a subroutine with three parameters and three local variables. The cells depicted in the stack are 32-bit wide memory locations, thus the memory addresses of the cells are 4 bytes apart. The first parameter resides at an offset of 8 bytes from the base pointer. Above the parameters on the stack (and below the base pointer), the call instruction placed the return address, thus leading to an extra 4 bytes of offset from the base pointer to the first parameter. When the ret instruction is used to return from the subroutine, it will jump to the return address stored on the stack.

Caller Rules
To make a subrouting call, the caller should:
- Before calling a subroutine, the caller should save the contents of certain registers that are designated caller-saved. The caller-saved registers are EAX, ECX, EDX. Since the called subroutine is allowed to modify these registers, if the caller relies on their values after the subroutine returns, the caller must push the values in these registers onto the stack (so they can be restore after the subroutine returns.
- To pass parameters to the subroutine, push them onto the stack before the call. The parameters should be pushed in inverted order (i.e. last parameter first). Since the stack grows down, the first parameter will be stored at the lowest address (this inversion of parameters was historically used to allow functions to be passed a variable number of parameters).
- To call the subroutine, use the call instruction. This instruction places the return address on top of the parameters on the stack, and branches to the subroutine code. This invokes the subroutine, which should follow the callee rules below.
After the subroutine returns (immediately following the call instruction), the caller can expect to find the return value of the subroutine in the register EAX. To restore the machine state, the caller should:
- Remove the parameters from stack. This restores the stack to its state before the call was performed.
- Restore the contents of caller-saved registers (EAX, ECX, EDX) by popping them off of the stack. The caller can assume that no other registers were modified by the subroutine.
Example
The code below shows a function call that follows the caller rules. The caller is calling a function _myFunc that takes three integer parameters. First parameter is in EAX, the second parameter is the constant 216; the third parameter is in memory location var.
push [var] ; Push last parameter first
push 216 ; Push the second parameter
push eax ; Push first parameter last
call _myFunc ; Call the function (assume C naming)
add esp, 12 ; Clean up 3 arguments (3 × 4 bytes = 12)
Note that after the call returns, the caller cleans up the stack using the add instruction. We have 12 bytes (3 parameters * 4 bytes each) on the stack, and the stack grows down. Thus, to get rid of the parameters, we can simply add 12 to the stack pointer.
The result produced by _myFunc is now available for use in the register EAX. The values of the caller-saved registers (ECX and EDX), may have been changed. If the caller uses them after the call, it would have needed to save them on the stack before the call and restore them after it.
Callee Rules
The definition of the subroutine should adhere to the following rules at the beginning of the subroutine:
- Push the value of EBP onto the stack, and then copy the value of ESP into EBP using the following instructions:
push ebp
mov ebp, espThis initial action maintains the base pointer, EBP. The base pointer is used by convention as a point of reference for finding parameters and local variables on the stack. When a subroutine is executing, the base pointer holds a copy of the stack pointer value from when the subroutine started executing. Parameters and local variables will always be located at known, constant offsets away from the base pointer value. We push the old base pointer value at the beginning of the subroutine so that we can later restore the appropriate base pointer value for the caller when the subroutine returns. Remember, the caller is not expecting the subroutine to change the value of the base pointer. We then move the stack pointer into EBP to obtain our point of reference for accessing parameters and local variables.
- Next, allocate local variables by making space on the stack. Recall, the stack grows down, so to make space on the top of the stack, the stack pointer should be decremented. The amount by which the stack pointer is decremented depends on the number and size of local variables needed. For example, if 3 local integers (4 bytes each) were required, the stack pointer would need to be decremented by 12 to make space for these local variables (i.e., sub esp, 12). As with parameters, local variables will be located at known offsets from the base pointer.
- Next, save the values of the callee-saved registers that will be used by the function. To save registers, push them onto the stack. The callee-saved registers are EBX, EDI, and ESI (ESP and EBP will also be preserved by the calling convention, but need not be pushed on the stack during this step).
After these three actions are performed, the body of the subroutine may proceed. When the subroutine is returns, it must follow these steps:
- Leave the return value in EAX.
- Restore the old values of any callee-saved registers (EDI and ESI) that were modified. The register contents are restored by popping them from the stack. The registers should be popped in the inverse order that they were pushed.
- Deallocate local variables. The obvious way to do this might be to add the appropriate value to the stack pointer (since the space was allocated by subtracting the needed amount from the stack pointer). In practice, a less error-prone way to deallocate the variables is to move the value in the base pointer into the stack pointer: mov esp, ebp. This works because the base pointer always contains the value that the stack pointer contained immediately prior to the allocation of the local variables.
- Immediately before returning, restore the caller’s base pointer value by popping EBP off the stack. Recall that the first thing we did on entry to the subroutine was to push the base pointer to save its old value.
- Finally, return to the caller by executing a ret instruction. This instruction will find and remove the appropriate return address from the stack.
Note that the callee’s rules fall cleanly into two halves that are basically mirror images of one another. The first half of the rules apply to the beginning of the function, and are commonly said to define the prologue to the function. The latter half of the rules apply to the end of the function, and are thus commonly said to define the epilogue of the function.
Example Here is an example function definition that follows the callee rules:
.486
.MODEL FLAT
.CODE
PUBLIC _myFunc
_myFunc PROC
; Subroutine Prologue
push ebp ; Save old base pointer
mov ebp, esp ; Establish new stack frame
sub esp, 4 ; Allocate 4 bytes for one local variable
push edi ; Save registers used
push esi
; Subroutine Body
mov eax, [ebp+8] ; Parameter 1 → EAX
mov esi, [ebp+12] ; Parameter 2 → ESI
mov edi, [ebp+16] ; Parameter 3 → EDI
mov [ebp-4], edi ; Store EDI into local variable
add [ebp-4], esi ; Add ESI into local variable
add eax, [ebp-4] ; Add local variable into EAX (result)
; Subroutine Epilogue
pop esi ; Restore registers
pop edi
mov esp, ebp ; Deallocate local variables
pop ebp ; Restore caller’s base pointer
ret
_myFunc ENDP
END
The subroutine prologue performs the standard actions of saving a snapshot of the stack pointer in EBP (the base pointer), allocating local variables by decrementing the stack pointer, and saving register values on the stack.
In the body of the subroutine we can see the use of the base pointer. Both parameters and local variables are located at constant offsets from the base pointer for the duration of the subroutines execution. In particular, we notice that since parameters were placed onto the stack before the subroutine was called, they are always located below the base pointer (i.e. at higher addresses) on the stack. The first parameter to the subroutine can always be found at memory location EBP + 8, the second at EBP + 12, the third at EBP + 16. Similarly, since local variables are allocated after the base pointer is set, they always reside above the base pointer (i.e. at lower addresses) on the stack. In particular, the first local variable is always located at EBP - 4, the second at EBP - 8, and so on. This conventional use of the base pointer allows us to quickly identify the use of local variables and parameters within a function body.
The function epilogue is basically a mirror image of the function prologue. The caller’s register values are recovered from the stack, the local variables are deallocated by resetting the stack pointer, the caller’s base pointer value is recovered, and the ret instruction is used to return to the appropriate code location in the caller.
Resources
- Guide to Using Assembly in Visual Studio—a tutorial on building and debugging assembly code in Visual Studio
- Intel x86 Instruction Set Reference
- Intel’s Pentium Manuals (the full gory details)